AZoQuantum speaks to Dr. Lyle Roberts, Head of Photonics & Systems at Advanced Navigation, about LUNA, a breakthrough laser-based navigation technology designed to enable precise guidance and landing on the Moon in the complete absence of GPS or reliable visual cues.
What inspired the development of LUNA, and how does it fit into Advanced Navigation’s vision for GPS-independent navigation?
Returning to the Moon has become the natural next step in human space exploration. There is now a surge in lunar exploration activities worldwide, driven by initiatives such as NASA's Artemis and Commercial Lunar Payload Services (CLPS) programs.
However, landing on the Moon is extremely difficult due to its lack of atmosphere and Global Navigation Satellite System (GNSS), poor lighting and crater-laden surface, among other factors. Despite growing efforts from governmental and commercial entities, recent years have witnessed a series of unsuccessful landings due to these complexities.
LUNA is designed to mitigate these challenges. It delivers precise three-dimensional velocity and altitude information relative to the lunar surface. When visual references are unavailable and cameras fail due to lack of light, dust and other obscurities, LUNA can serve as a primary navigation input.

Image Credit: Advanced Navigation
How do LUNA’s systems (laser velocimetry, laser vision, etc.) work in principle, and what sets them apart from traditional inertial navigation technologies?
LUNA is designed for precise and accurate velocity-aiding in GNSS-denied environments. By exploiting laser Doppler velocity sensing, it is capable of providing direct, drift-free velocity measurements, ensuring continuous, high-precision mobility for lunar terrain vehicles, hoppers, and rovers.
When integrated with high-performance fiber-optic gyroscope-based inertial navigation systems, LUNA can overcome key challenges in planetary navigation, including wheel slip from loose regolith, extreme lighting variations, and sparse terrain features.
Could you walk us through some of the key test campaigns, such as simulated lunar descents or deep underground trials, and what they revealed about LUNA’s capabilities?
We put LUNA through some of the most demanding Earth-based analogues we could find, and each campaign taught us something different about how the system performs in extreme, GPS-denied environments.
To simulate the high-dynamics of the final 5km lunar descent, a LUNA sensor was flown on a light aircraft over the sandy terrain of Western Australia’s Pinnacles Desert, which served as a proxy for lunar regolith. In these GPS-denied flights, the system demonstrated a mere 28m of error after 100km of flight.
Tests were also conducted in Europe’s deepest mine in Finland to simulate surface rover navigation. The harsh, dark, dusty, and GPS-denied conditions served as a direct analogue for a rover navigating shadowed Moon craters. Across a 6km stretch 400m below ground surface, LUNA achieved a best-case 3D position error of just 0.55m (0.009%) and an average error of 2.83m (0.047%). To put it into perspective, standard GPS typically delivers 2-10m of accuracy in open-sky conditions; LUNA surpassed this in an underground labyrinth.
The implications of LUNA extend well beyond its immediate role in lunar landing systems. For sustained lunar surface operations, the ability to deliver drift-free velocity measurements independent of visual references enables reliable navigation for rovers, hoppers, and mining platforms. This directly supports the establishment of long-duration lunar bases, autonomous resource extraction, and logistics operations in regions such as permanently shadowed craters where lighting is insufficient for vision-based navigation.
The commercial implications are equally significant. Demonstrated at Europe’s deepest mine, LUNA showed its capacity to transform navigation in GNSS-denied terrestrial domains, such as underground mining. LUNA enables scalable autonomy and improved safety in industries where reliable navigation has long been a barrier.
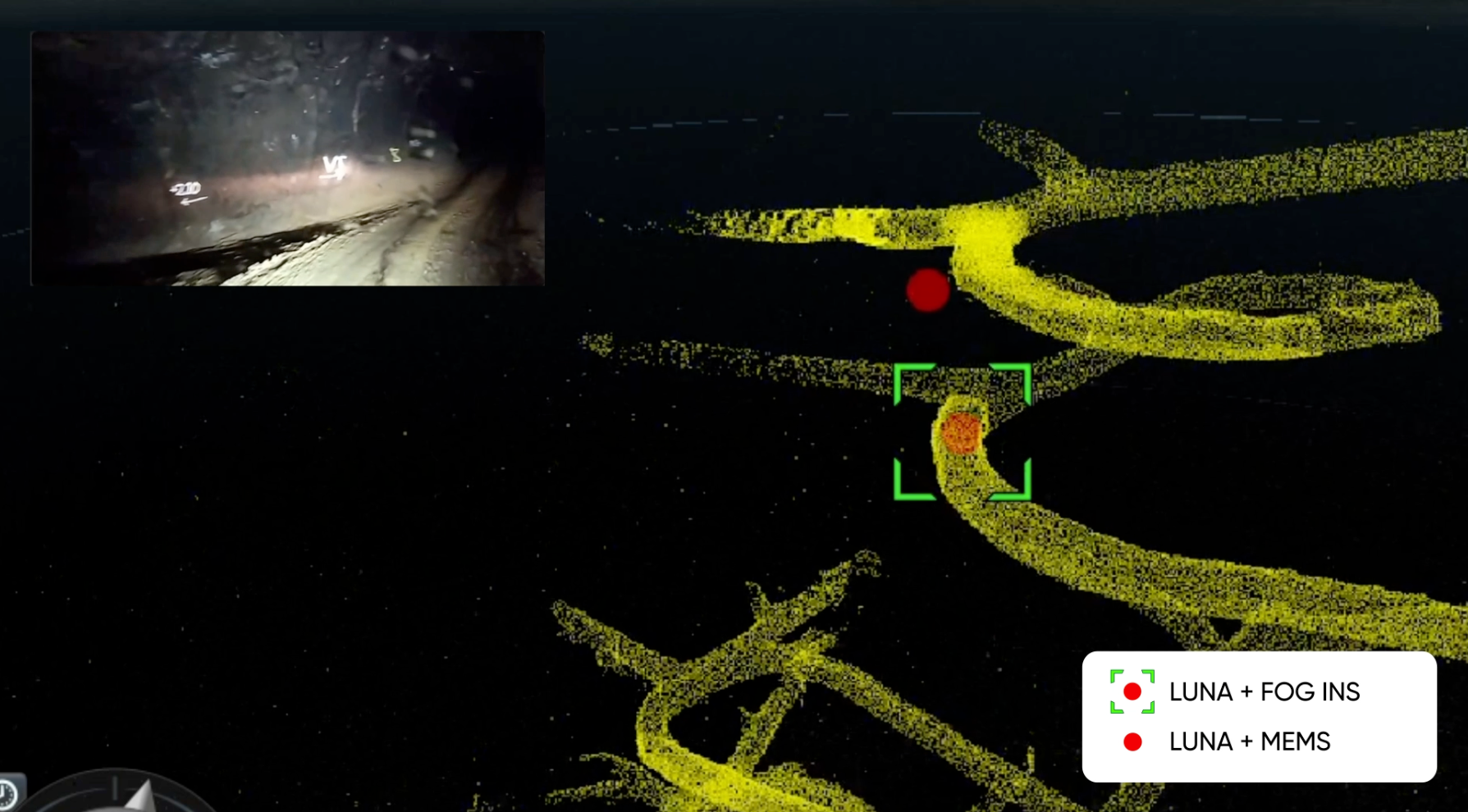
Image of the live data stream of LUNA navigating the underground mine. Image Credit: Advanced Navigation
In what ways does LUNA push the frontier of precision metrology and measurement, particularly in contexts where even GPS would struggle or fail outright?
In a global collaboration with U.S. space company Intuitive Machines (IM), LUNA will be demonstrated on board IM’s Nova-C lander during the final descent en route to the Moon in 2027.
IM is revolutionizing Moon missions under NASA’s Commercial Lunar Payload Services (CLPS) program. Their mission? To make autonomous lunar landings commercially viable.
With customers paying over USD $1M per kilogram delivered, success depends on minimizing spacecraft mass while maximizing reliability to ensure safe delivery. This challenge involves sourcing novel, lightweight sensor technologies that provide a step change in the lander’s ability to navigate autonomously.
This drove an overarching design philosophy on LUNA to transfer as much complexity from the hardware system into software to reduce the weight, cost, and size. For example, LUNA uses a light detection and ranging (LiDAR) technique, requiring only 50g of hardware to implement. The team also used an ultra-low mass receiver originally developed for the telecommunications industry, saving more than 300g and providing enhanced functionality that resulted in a performance jump of over 40%.
To complicate things further, LUNA must survive the ambient temperatures, atmospheric pressures and cosmic radiation of space. These challenges typically motivate engineers to select expensive, pre-qualified space-grade components to maximize reliability.
Given LUNA must be commercially viable, the team used a combination of defense and automotive-grade components, as well as space-grade components to dramatically reduce costs by 10x. Where NASA’s current experimental sensor weighs more than 18kg, LUNA weighs 2.8kg and is approximately 8x smaller in overall volume. It also provides functionality and performance which will replace multiple legacy sensors, further reducing mass and cost.
In purely economic terms, LUNA represents several millions of dollars in value to companies like IM.
Quantum technologies like inertial sensors and atomic clocks are often highlighted for precision navigation. How does LUNA’s approach compare or complement these quantum-based systems?
LUNA is designed to complement inertial navigation systems (whether based on classical or quantum technologies). Quantum sensors and LUNA perform different roles in precision navigation:
Inertial Navigation System: An Inertial Navigation System (INS) is the vehicle's core navigator. It uses gyroscopes and accelerometers to measure the vehicle's motion (I.e. acceleration and rotation) to calculate its position.
The Challenge: The primary challenge for any INS, whether classical or quantum, is that tiny, unavoidable measurement errors accumulate over time, causing the calculated position to 'drift' from the true position.
Quantum's Role: Advanced quantum sensors, like those based on atom interferometry, are a very exciting field of research. Their goal is to create a new generation of INS that is extremely stable and "drift-free," allowing a vehicle to navigate accurately for long periods without any external references (such as GPS). Atomic clocks contribute by providing the ultra-precise timing needed for this.
LUNA's Role (The Velocity Aid): LUNA is a different type of tool. It's not a navigation system, nor does it exploit inertial physics to work. LUNA is a high-precision external aiding sensor.
LUNA (Laser measurement Unit for Navigational Aid) does one job with extreme precision: it measures the vehicle's velocity relative to a nearby surface. During lunar descent, for example, it bounces lasers off the Moon's surface to enable highly accurate velocity measurements in real-time.
This velocity data is then "fused" with the data from the vehicle's INS. This "sensor fusion" is the key. LUNA's precise velocity measurement provides a constant, external truth-check for the INS. It effectively corrects the INS's drift in real-time, preventing errors from accumulating.
By integrating LUNA's velocity data, the spacecraft's overall navigation system can dramatically improve its position estimate.
So, LUNA isn't a replacement for an advanced quantum INS. Rather, it's a ready-to-deploy, exceptionally accurate velocity aid that enhances the performance of any navigation system it's paired with. A system using LUNA plus a high-quality classical INS achieves the extreme accuracy needed for a precise, safe landing, all without needing GPS. In the future, LUNA's data would be just as valuable when fused with a quantum-based INS, providing an independent, external measurement to make the entire system even more robust.
Advanced Navigation on the Moon with Intuitive Machines Nova-C Lander
With the Artemis program and commercial lunar missions gaining momentum, how do you see LUNA contributing to a sustained human and robotic presence on the Moon in the coming decade?
Outside of the Nova-C Lander, the lightweight and performance capabilities of LUNA are also well suited for IM’s Micro-Nova, a mini extreme mobility lunar vehicle also known as a “hopper”. The spacecraft will explore shadowed craters and lava tubes, using LUNA to help it navigate autonomously, regardless of ambient light conditions and lack of access to GPS.
The Moon, however, is just the starting point. NASA’s Moon to Mars Architecture delineates possible future expeditions to the Red Planet Mars. As navigation and landing capabilities will be all the more important, LUNA is expected to play a key role in this mission.
LUNA is fully researched, founded and manufactured on Australian soil. It serves as a prime example of Australia’s sovereign manufacturing capability and technological complexity, and serves as a catalyst for autonomous space exploration and transportation.
About the Speaker

Physicist Dr. Lyle Roberts is Head of Photonics & Systems at Advanced Navigation where his team works at the nexus of photonics, signal processing, and laser interferometry to develop breakthrough technologies for navigation. Lyle joined Advanced Navigation in 2021 after Vai Photonics, the company he co-founded to commercialise his research at The Australian National University (ANU), was acquired.
Prior to co-founding Vai Photonics in 2021, Lyle was a research fellow at the ANU’s Centre for Gravitational Astrophysics researching a range of technologies including instrumentation for satellite laser ranging systems such as NASA’s Mass Change (MC) and Laser Interferometer Space Antenna (LISA) missions.
Disclaimer: The views expressed here are those of the interviewee and do not necessarily represent the views of AZoM.com Limited (T/A) AZoNetwork, the owner and operator of this website. This disclaimer forms part of the Terms and Conditions of use of this website.